An enhanced deep convolutional encoder-decoder network for road segmentation on aerial imagery
Abstract
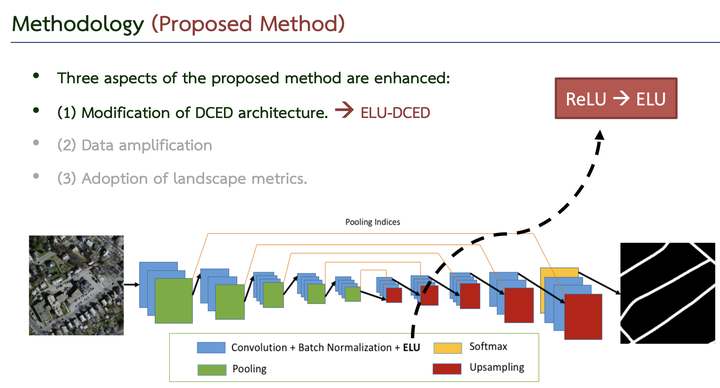
Object classification from images is among the many practical examples where deep learning algorithms have successfully been applied. In this paper, we present an improved deep convolutional encoder-decoder network (DCED) for segmenting road objects from aerial images. Several aspects of the proposed method are enhanced, incl. incorporation of ELU (exponential linear unit)—as opposed to ReLU (rectified linear unit) that typically outperforms ELU in most object classification cases; amplification of datasets by adding incrementally-rotated images with eight different angles in the training corpus (this eliminates the limitation that the number of training aerial images is usually limited), thus the number of training datasets is increased by eight times; and lastly, adoption of landscape metrics to further improve the overall quality of results by removing false road objects. The most recent DCED approach for object segmentation, namely SegNet, is used as one of the benchmarks in evaluating our method. The experiments were conducted on a well-known aerial imagery, Massachusetts roads dataset (Mass. Roads), which is publicly available. The results showed that our method outperforms all of the baselines in terms of precision, recall, and F1 scores.
Teerapong Panboonyuen
My research focuses on leveraging advanced machine intelligence techniques, specifically computer vision, to enhance semantic understanding, learning representations, visual recognition, and geospatial data interpretation.