The Bangkok Urbanscapes Dataset for Semantic Urban Scene Understanding Using Enhanced Encoder-Decoder with Atrous Depthwise Separable A1 Convolutional Neural Networks
Abstract
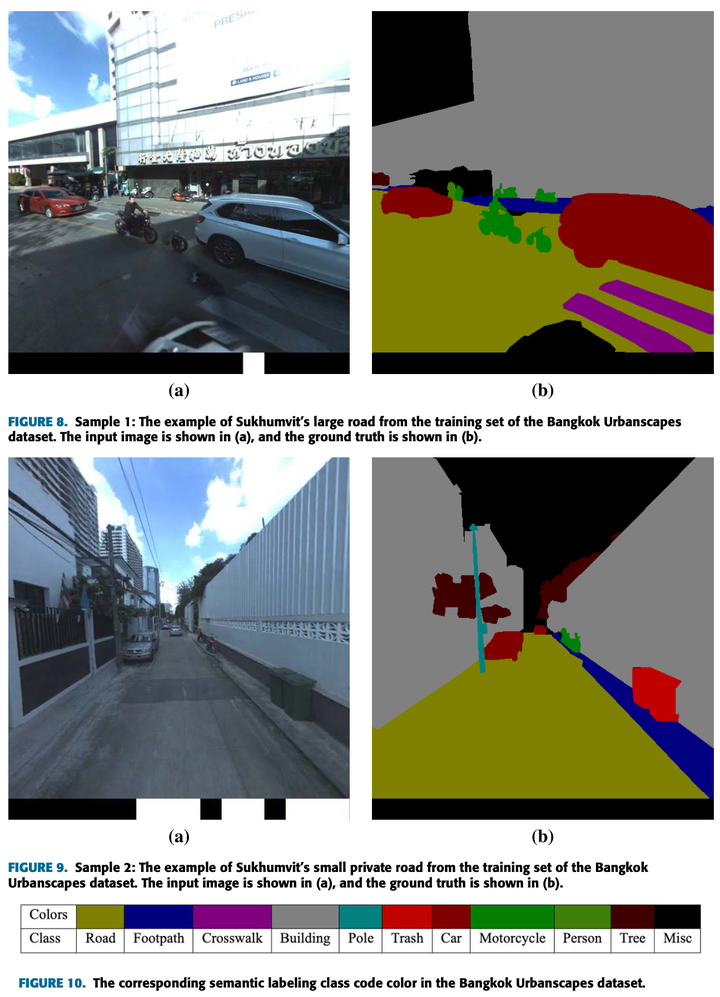
This paper addresses semantic segmentation for autonomous driving systems, focusing on self-driving cars in Thailand. We introduce DeepLab-V3-A1 with Xception, an enhanced version of DeepLab-V3+, and present the Bangkok Urbanscapes dataset. Our method improves segmentation accuracy by refining the decoder and modifying the Xception backbone. Experiments on four datasets, including CamVid, Cityscapes, IDD, and our proposed dataset, show our approach performs comparably to baseline methods. Our dataset includes 701 annotated images of various Bangkok driving environments, covering eleven semantic classes. The architecture and dataset aim to aid developers in improving autonomous driving systems for diverse urban conditions. Implementation codes and dataset are available at https://kaopanboonyuen.github.io/bkkurbanscapes.
Teerapong Panboonyuen
My research focuses on leveraging advanced machine intelligence techniques, specifically computer vision, to enhance semantic understanding, learning representations, visual recognition, and geospatial data interpretation.