Enhanced Feature Pyramid Vision Transformer for Semantic Segmentation on Thailand Landsat-8 Corpus
Abstract
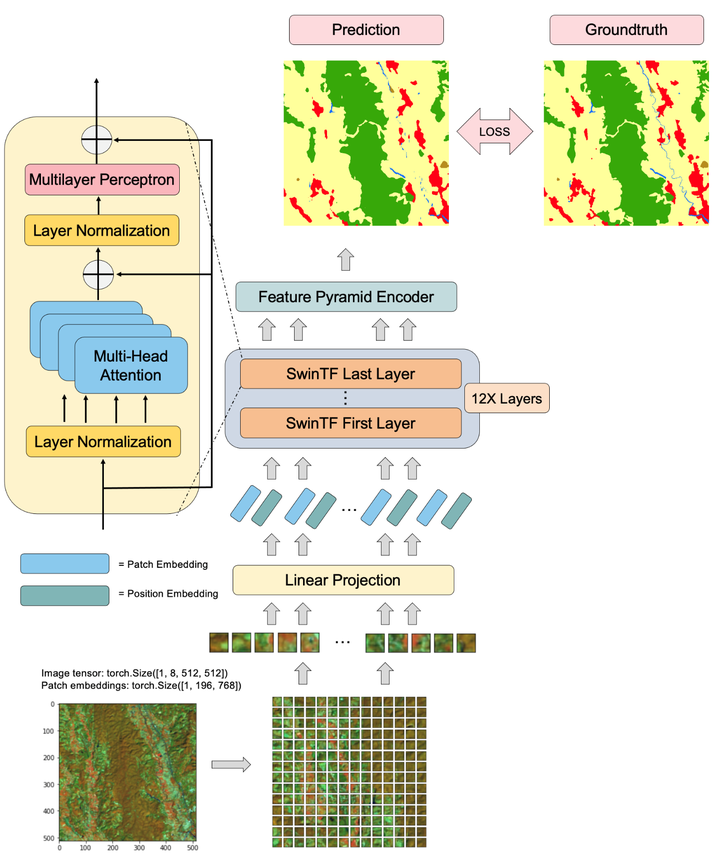
Semantic segmentation on Landsat-8 data is crucial in the integration of diverse data, allowing researchers to achieve more productivity and lower expenses. This research aimed to improve the versatile backbone for dense prediction without convolutions—namely, using the pyramid vision transformer (PRM-VS-TM) to incorporate attention mechanisms across various feature maps. Furthermore, the PRM-VS-TM constructs an end-to-end object detection system without convolutions and uses handcrafted components, such as dense anchors and non-maximum suspension (NMS). The present study was conducted on a private dataset, i.e., the Thailand Landsat-8 challenge. There are three baselines, DeepLab, Swin Transformer (Swin TF), and PRM-VS-TM. Results indicate that the proposed model significantly outperforms all current baselines on the Thailand Landsat-8 corpus, providing F1-scores greater than 80% in almost all categories. Finally, we demonstrate that our model, without utilizing pre-trained settings or any further post-processing, can outperform current state-of-the-art (SOTA) methods for both agriculture and forest classes.
Teerapong Panboonyuen
My research focuses on leveraging advanced machine intelligence techniques, specifically computer vision, to enhance semantic understanding, learning representations, visual recognition, and geospatial data interpretation.